品牌:艺通
产品别名:机械手臂,机器人,简易机器人,往复式机械手
产品用途:简易机械手,往复式机械手,点对点机械手
功率:2.2kw
起订:2套
| 产品别名 | 机械手臂,机器人,简易机器人,往复式机械手 |
|---|---|
| 产品用途 | 简易机械手,往复式机械手,点对点机械手 |
| 类型 | 全新 |
| 产地 | 广东 |
| 功率 | 2.2kw |
| 规格 | 300x300mm,350x350mm,330x330mm,320x320mm |
| 用途 | 简易机械手,往复式机械手,点对点机械手 |
| 滚动体列数 | 多列 |
| 滚道类型 | 球面滚道 |
| 适用行业 | 工业,企业,工厂,车间,制造业 |
| 品牌 | 艺通机械 |
| 型号 | 125A低压,175A低压,150A低压 |
| 加工定制 | 是 |
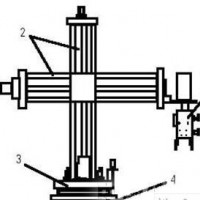
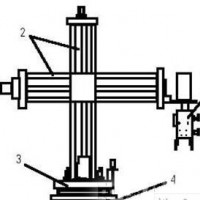
艺通机械专业设计生产点对点机械手,简易机械手,往复式机械手等自动化设备
在现今的工作和生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂**大区别**在于灵活度与耐力度。也**是机械手的**大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!可为机械手臂的应用也将会越来越广泛,机械手和机器手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力,机械手机器人是一个重要组成部分。
艺通机械专业为有需要的客户设计制作各种简易式、气动式、电动式、机械式机械手机器人手臂,可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,以达到低投入高回报的目标。主要让机器人在机械制造业中代替人完成大批量、高质量要求的工作,如汽车制造、舰船制造及某些家电产品(电视机、电冰箱、洗衣机)的制造等。化工等行业自动化生产线中的点焊、弧焊、喷漆、切割、电子装配及物流系统的搬运、包装等工作,也有部分是由机器人完成的。
近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求;微电子技术的引进,促进了电气比例伺服技术的发展,现代控制理论的发展,负气动技术从开关控制进进闭环比例伺服控制,控制精度不断进步;由于气动脉宽调制技术具有结构简单、抗污染能力强和本钱低廉等特点,国内外都在大力开发研究。气压传动工作压力较低,运作提件简单,容易,处理方便,一般压缩空气可存贮在储气罐中**算发生突然断电也不会导致工艺流程突然中断。
气动机械手通用性强,机械手臂采用气流负压式吸盘或是夹持式,能实现手腕回转运动,按照抓取工件的要求,手臂有三个自由度,即手臂的伸缩、左右回转、和上下升降运动。回转与升降运动是通过立柱来实现的。
横向移动为手臂的横移,手臂的各种运动都是由气缸来实现的,由于气压传动系统动作迅速、反应灵敏、阻力损失和泄漏较小,成本低廉,有一定的承载能力,在足够的工作空间以及在任意位置都能自动定位等特性。
由气动元件组成的控制系统只适用于简单工艺、小型产品,因为定位方面欠缺,不能在高速情况下实现高度的定位。气动技术是以空气压缩机为动力源,以压缩空气为工作介质,进行能量传递或信号传递的工程技术,是实现各种生产控制、自动控制的重要手段之一。
大约开始于1776年,Johnwilkimson发明能产生1个大气压左右压力的空气压缩机。1880年,人们利用气缸做成气动刹车装置,将它成功地用到火车的制动上。20世纪30年代初,气动技术成功地应用于自动门的开闭及各种机械的辅助动作上。至50年代初,大多数气压元件从液压元件改造或演变过来,体积很大。60年代,开始构成产业控制系统,自成体系,不再与风动技术相提并论。在70年代,由于气动技术与电子技术的结合应用,在自动化控制领域得到广泛的推广。80年代进进气动集成化、微型化的时代。90年代至今,气动技术突破了传统的死区,经历着奔腾性的发展,人们克服了阀的物理尺寸局限,真空技术日趋稳定,高精度模块化气动机械手问世,智能气动这一概念产生,气动伺服定位技术负气缸高速下实现任意点自动定位,智能阀岛十分理想地解决了整个自动生产线的分散与集中控制题目。
气动机械手作为机械手的一种,它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。
气动机械手夸大模块化的形式,现代传输技术的气动机械手在控制方面采用了先进的阀岛技术(可重复编程等),气动伺服系统(町实现任意位置上的确定位),在执行机构上全部采用模块化的拼装结构。
90年代初,由布鲁塞尔军事学院Y·Bando教授领导的综合技术部开发研制的电子气动机器人——“阿基里斯”六脚勘探员,是气动技术、PLC控制技术和传感技术结合产生的“六足动物”。
6个脚中的每一个脚都有3个自由度,一个直线气缸把脚提起、放下,一个摆动马达控制脚伸展/退回运动,另一个摆动马达则负责围绕脚的轴心做旋转之用。精度是指机器人、机械手到达指定点的准确程度,它与驱动器的分辨率以及反馈装置有关。重复精度是指假如动作重复多次,机械手到达同样位置的准确程度。重复精度比精度更重要,假如一个机器人定位不够准确,通常会显示一个固定的误差,这个误差是可以猜测的,因此可以通过编程予以校正。重复精度限定的是一个随机误差的范围,它通过一定次数地重复运行机器人来测定。随着微电子技术和现代控制技术的发展,以及气动伺服技术走出实验室和气动伺服定位系统的成套化。气动机械手的重复精度将越来越高,它的应用领域也将更广阔,如核产业和军事产业等。
微信:18688057301